
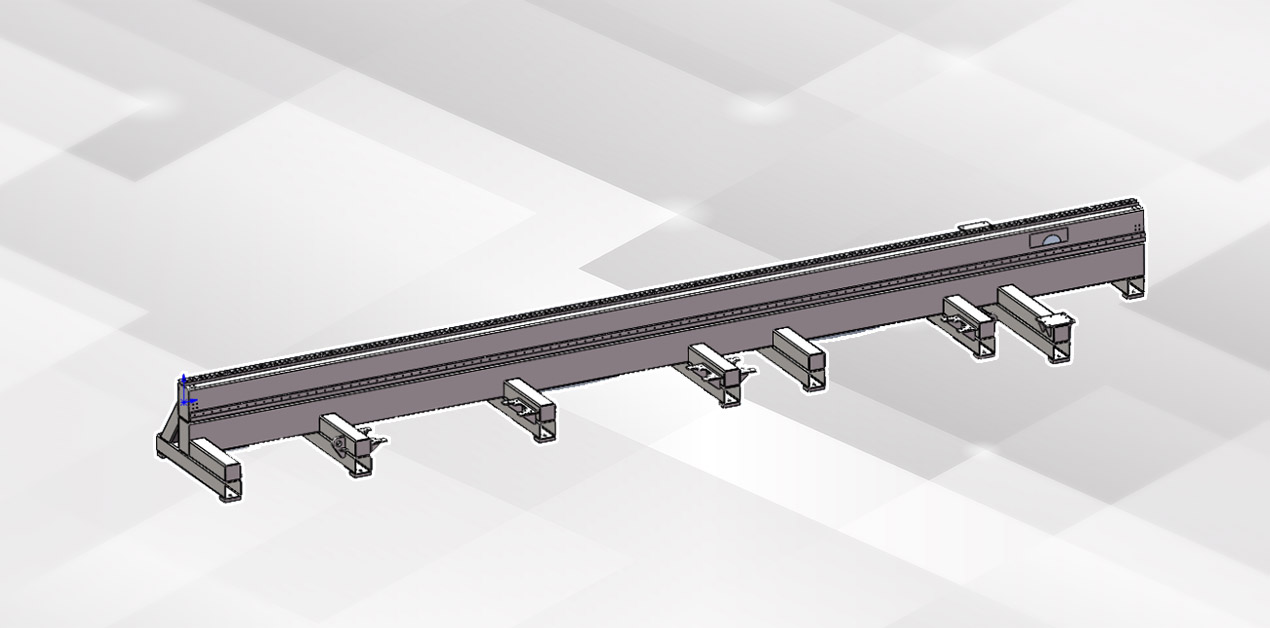
Sehemu Kitanda Kilichounganishwa kwa Upande
Kitanda Kilichounganishwa kwa Upande Kitanda kinatumia muundo unaoning'inia pembeni na kitanda chenye kipande kimoja cha svetsade, ambacho hufungwa ili kuondoa msongo wa ndani. Baada ya usindikaji mbaya, kuzeeka kwa mtetemo hufanywa kabla ya kumaliza usindikaji, na hivyo kuboresha sana ugumu na uthabiti wa kifaa cha mashine na kuhakikisha usahihi wa kifaa cha mashine. Kiendeshi cha AC servo motor kinadhibitiwa na mfumo wa udhibiti wa nambari, na chuck hutambua mwendo wa kurudiana katika mwelekeo wa Y baada ya kuendesha gari, na kutambua mwendo wa haraka na mwendo wa kulisha. Raki ya mhimili wa Y na reli ya mwongozo wa mstari zimetengenezwa kwa bidhaa za usahihi wa hali ya juu, ambazo zinahakikisha usahihi wa usafirishaji; swichi za kikomo katika ncha zote mbili za kiharusi zinadhibitiwa, na kifaa cha kikomo kigumu kimewekwa kwa wakati mmoja, ambacho kinahakikisha usalama wa harakati za kifaa cha mashine; kifaa cha mashine kina vifaa. Kifaa cha kulainisha kiotomatiki huongeza mafuta ya kulainisha kwenye sehemu zinazosogea za kitanda kwa vipindi vya kawaida ili kuhakikisha kwamba sehemu zinazosogea zinafanya kazi katika hali nzuri, ambayo inaweza kuboresha maisha ya huduma ya reli za mwongozo, gia na raki.
Kuna seti 2 za mifumo ya usaidizi iliyowekwa kwenye kitanda, na kuna aina mbili zinazopatikana:1. Usaidizi wa ufuatiliaji unadhibitiwa na mota huru ya servo ili kusogea juu na chini, hasa kutekeleza usaidizi wa ufuatiliaji kwa ajili ya mabadiliko makubwa ya mabomba yaliyokatwa kwa muda mrefu (mabomba yenye kipenyo kidogo). Wakati chuck ya nyuma inaposogea kwenye nafasi inayolingana, usaidizi msaidizi unaweza kushushwa ili kuepuka.2. Usaidizi wa gurudumu lenye kipenyo kinachobadilika huinuliwa na kushushwa na silinda, na unaweza kurekebishwa kwa mikono kwa nafasi tofauti za mizani ili kuunga mkono mabomba ya ukubwa tofauti.
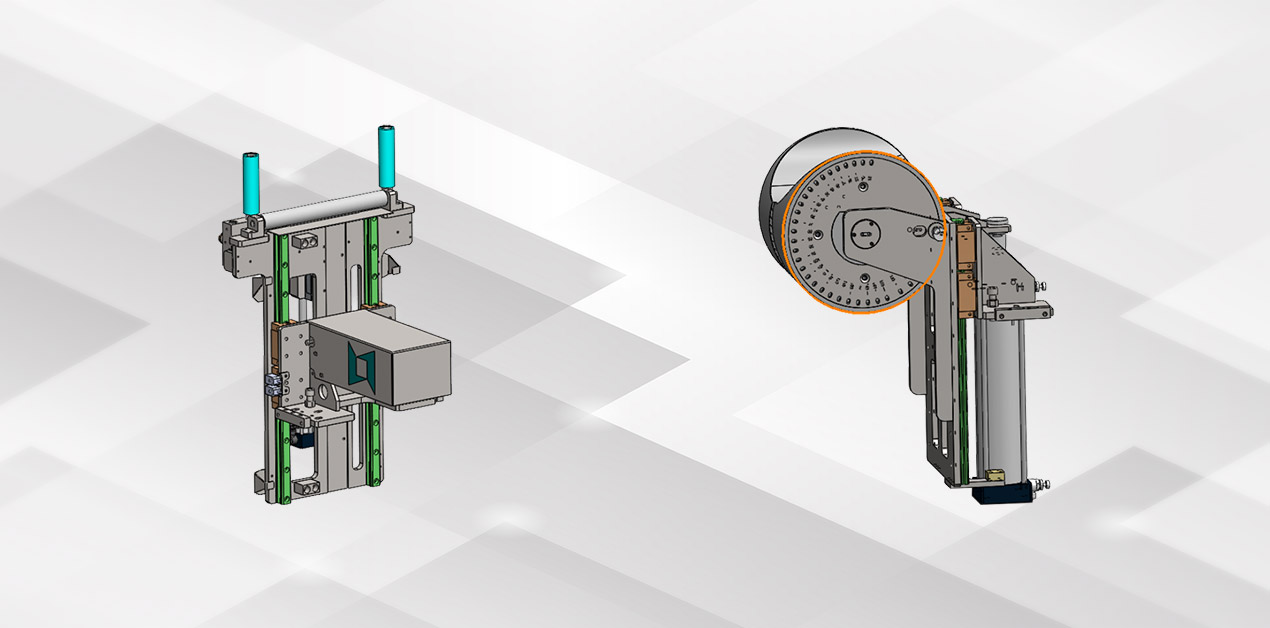
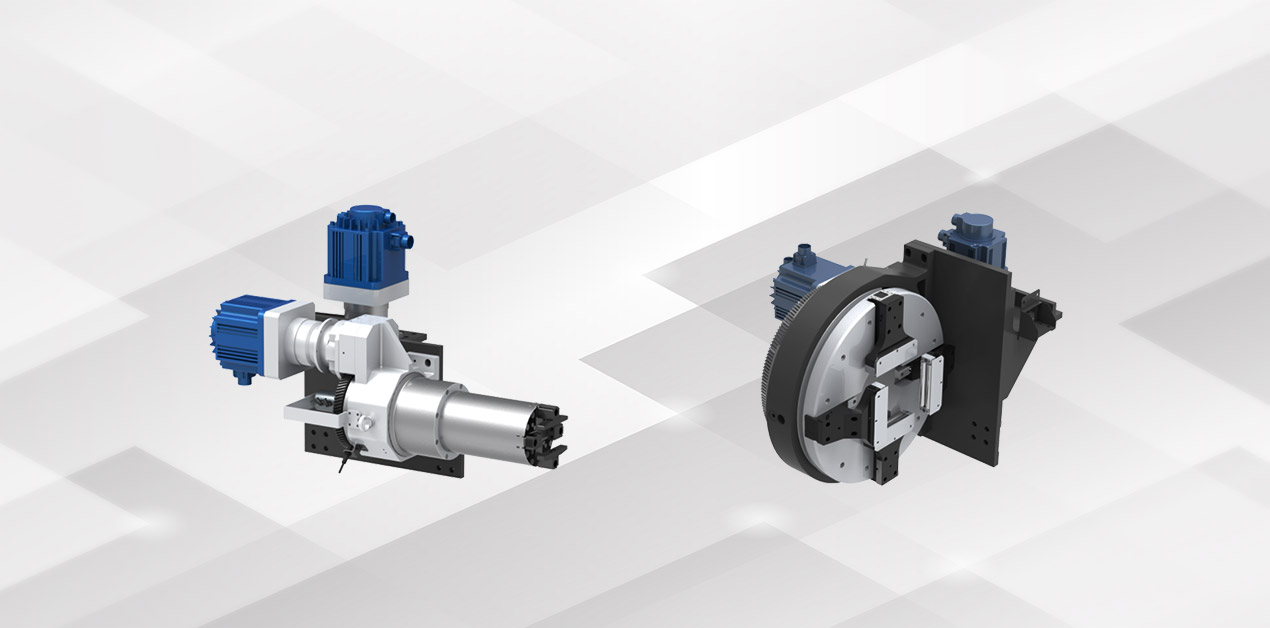
Chuki imegawanywa katika chuki mbili za mbele na nyuma zenye mkazo kamili, ambazo zote zinaweza kusogea katika mwelekeo wa Y. Chuki ya nyuma inawajibika kwa kubana na kulisha bomba, na chuki ya mbele imewekwa mwishoni mwa kitanda kwa ajili ya vifaa vya kubana. Chuki za mbele na nyuma huendeshwa mtawalia na mota za servo ili kufikia mzunguko sanjari. Chini ya kubana kwa pamoja kwa chuki mbili, kukata mkia mfupi kunaweza kufikiwa, na mkia mfupi wa mdomo unaweza kufikia 20-40mm, huku ukiunga mkono kukata mkia mfupi wa mkia mrefu. Mashine ya kukata bomba ya mfululizo wa TN hutumia njia ya harakati na kuepuka chuki, ambayo inaweza kutambua kukata kwa chuki mbili wakati wote, na haitasababisha bomba kuwa refu sana na lisilo imara, na usahihi hautoshi.
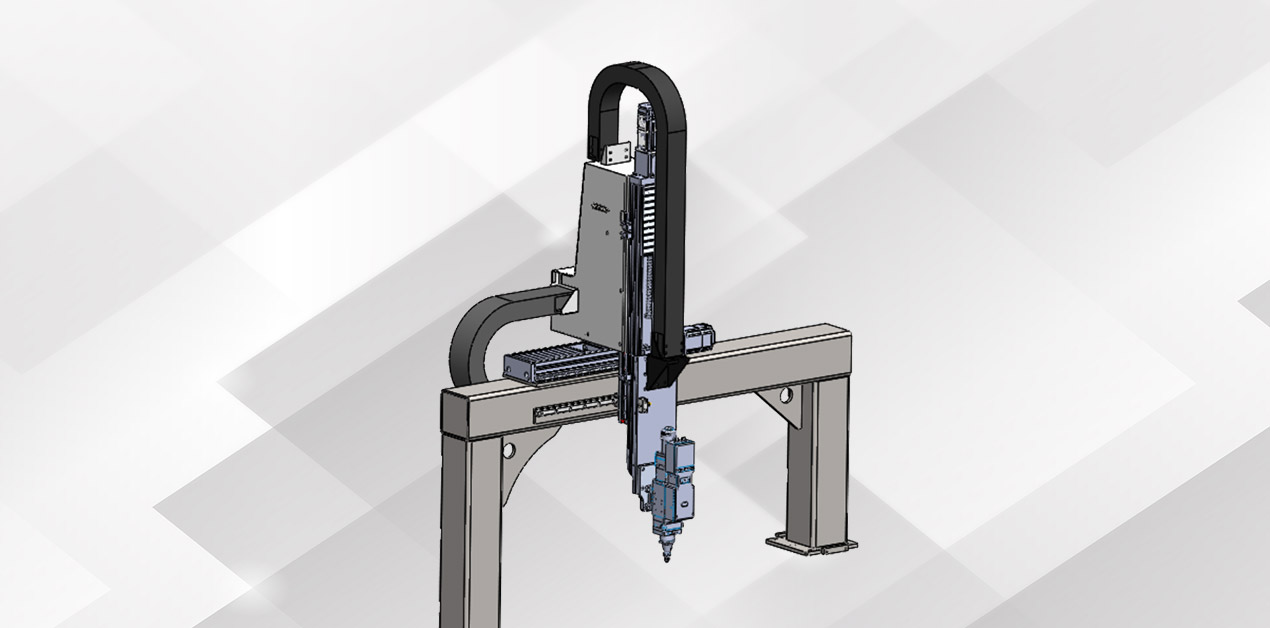
Mwangaza wa kifaa cha mhimili wa X unatumia muundo wa gantry, ambao umeunganishwa kwa mchanganyiko wa bomba la mraba na bamba la chuma. Sehemu ya gantry imewekwa kwenye kitanda, na mhimili wa X unaendeshwa na mota ya servo ili kuendesha rafu na pini ili kufikia mwendo wa kurudiana wa bamba la slaidi katika mwelekeo wa X. Katika mchakato wa harakati, swichi ya kikomo hudhibiti kiharusi ili kupunguza nafasi ili kuhakikisha usalama wa uendeshaji wa mfumo. Wakati huo huo, mhimili wa X/Z una kifuniko chake cha kiungo ili kulinda muundo wa ndani na kufikia ulinzi bora na athari za kuondoa vumbi. Kifaa cha mhimili wa Z hutambua zaidi harakati ya juu na chini ya kichwa cha leza. Mhimili wa Z unaweza kutumika kama mhimili wa CNC kufanya harakati zake za uingiliaji kati, na wakati huo huo, unaweza kuunganishwa na shoka za X na Y, na pia unaweza kubadilishwa kuwa udhibiti wa ufuatiliaji ili kukidhi mahitaji ya hali tofauti.